آموزش علم رباتیک
در این وبلاگ مطالبی آموزشی در مورد ساخت ربات و اخبار مسابقات رباتیک خواهیم داشت!آموزش علم رباتیک
در این وبلاگ مطالبی آموزشی در مورد ساخت ربات و اخبار مسابقات رباتیک خواهیم داشت!کنکور!!!
سلام !
البته بعد از ۲ ماه ...
سرمون حسابی شلوغه کنکوره و بدبختیاش ... این کنکورم شد باعث اینکه ( متاسفانه) دیگه نتونم بیام و بنویسم (البته برای شما خوشبختانه !
از طرفی چون این وبلاگ یه کمی بازدیدکننده داره خیلی ها اومدن گفتن که چرا ادامه نمیدی ! بعداز کلی تست و امتحان قرعه این وبلاگ به نام علی آقا در آمد و ایشان فعلا مدیر این وبلاگ هستن (البته منم نظارت خودمو دارم .)!
از قبال ایشون مطمینم که حتما به ارزش های این وبلاگ اضافه می کنه....
منم احتمالا هر ماه یک پست غیر آموزشی مثل همین خواهم داشت ..........
در مورد اون کسایی که میل زدن وراهنمایی در مورد مسیریاب خواسته بودنخواستم بگم الان تو سایت ایران رباتیک یه کیت آموزشی خیلی خوب دیدم که برای تازه کار ها (البنه سرور ما هستن ) خیلی مفیده حتما تهیه کنید ....
موفق و پیروز باشید
کیا کرباسی
ارتباط با ما !
سلام ...
بالاخره از شمال برگشتیم و دوباره کار بلاگیدن شروع کردیم
اول از همه از دوستانی کامنت هاشون به ما خیلی لطف کردن کمال تشکر رو دارم .
جون که دیدم یه عده از دوستان سوال فنی دارن و منم وقت نداشتم برای همه یکی یکی میل بزنم این پست رو گذاشتم. ای میل من :
دوستان می تونین به این آدرس میل یا IM بزنین ... (حتما پاسخ خواهم داد -البته از راه IM )
امیدوارم همیشه پیروز و سر بلند باشید ...
آموزش ساخت ربات مسیریاب (برنامه نویسی )
سلام دوستان!
همونطور که اطلاع دارید قرار بود زحمت برنامه نویسی رو سالار بکشه ولی امان از .....
اما من که نمی زارم میت رو زمین بمونه.
به امید خدا از امروز برنامه نویسی رو خودم شروع می کنم ....
امروز می خواهیم برنامه ای بنویسیم که بوسیله اون بشه استپر موتورهامون رو راه اندازی کنیم (عین همین روش رو باید در برنامه اصلی ربات استفاده کنیم) :
|
$crystal = 1000000 Config Portb = Output Dim A As Byte B = &B10001000 Do Rotate B , Right Waitms 15 End |
خوب حالا خط به خط تحلیل می کنیم. البته خوب یادمه توضیحات کاملی رو در مورد کدهای استفاده شده در چهار خط اول در پست های "آموزش ساخت ربات (میکرو کنترلر 1 - 2 - 3 - 4) دادم. پس اگه یادتون رفته بهشون دوباره سر بزنید.
|
Dim A As Byte Dim B As Byte |
کلا در زبان های خانواده بیسیک که کامپایلر BASCOM هم از اون استفاده می کنه، از کلمات Dim و as به صورت Dim varname as type برای تعریف متغیر استفاده می شه، که varname نام متغیر و type نوع متغیر هستش. در اینجا دو متغیر به نامهای A و B با نوع Byte معرفی شدن (هر بایت از ۸ بیت تشکیل شده)
|
B = &B10001000 |
استفاده از " مقدار = نام متغیر " که برای همه قابل درکه (یعنی یک مقدار رو داخل متغیر بریزیم) اما در اینجا بجای مقدار از &B10001000 استفاده شده. برای قرار دادن مقادیر به صورت باینری در یک متغیر (در این زبان) باید مقدار باینری رو بعد از B& بنویسم. در اینجا، هم در A و هم در B مقدار باینری ۱۰۰۰۱۰۰۰ معادل دهدهی ۱۳۶ رو قرار دادیم. که دلیلش رو توضیح خواهم داد.
باقیش بمونه برای جلسه بعد !
اینم یه لینک برای کسانی که می خوان سریع یه مسیریاب بسازن :
نظر یادتون نره !
مبانی الکترونیک در روباتیک
سلام !
قصد داشتم از امروز مباحث مربوط به برنامه نویسی رو شروع کنم .
اما چون یکی از دوستان به نام آقای لیدی قراره از این به بعد بیاد و در این وبلاگ بنویسه بنا به خواسته خودشون مباحث مربوط به برنامه نویسی به ایشان واگذار شد .
قراره از این به بعد بیاد و در این وبلاگ بنویسه بنا به خواسته خودشون مباحث مربوط به برنامه نویسی به ایشان واگذار شد .
امروزم مطالبی در مورد لحیم کاری و بعضی قطعات جمع آوری کردم که امیدوارم براتون مفید باشه :
لحیم
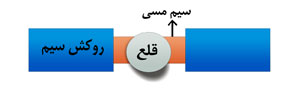
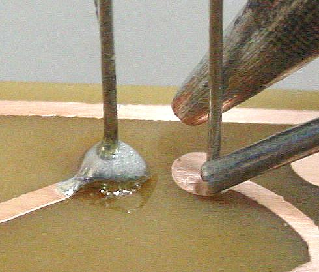
یکی از مهمترین مهارتهایی که شما برای ساختن روبات به آن احتیاج دارد لحیم کردن است.لحیم کردن اتصال دو قطعه فلز به همدیگر از طریق ماده ای به نام قلع می باشد.زمانیکه شمابخواهید دو قطعه سیم مسی را بهم متصل کنید.آندو را به گونه ای روی همدیگر می گذارید.که بدنه لخت آن که روکش پلاستیکی ندارد روی هم قرار بگیرد.سپس نوک هویه را روی آن می گذاریم و قلع را نیز به این اتصال نزدیک می کنیم.زمانیکه قلع ذوب شود.و از حالت جامد خود خارج شود.سبب اتصال دو فلز به یکدیگر می شود.در این لحظه نوک هویه را از محل اتصال دور کنید.پس از مدت زمان کوتاهی قلع حالت روانی خودش را از دست میدهد.و کاملا سفت می شود.،و سبب اتصال دو سیم مسی به یکدیگر می شود.
هدف از لحیم کردن اتصال دو سیم مسی از طریق حرارت و قلع در کمترین زمان ممکن و پایدار ماندن این اتصال پس از لحیم کردن می باشد.قلعی که بر روی سیمها قرار می گیرد.مانع از فساد و زنگ خوردگی بدنه لخت سیمها می شود.لحیم کردن سیمهایی که دچار خوردگی و زنگ زندگی شده اند بسیار
مشکل است.
 |
 |
در هنگام لحیم کردن به نکات زیر توجه کنید.
1-جا ییکه در آن لحیم می کنید.،تهویه خوبی داشته باشد.2-در هنگام لحیم کردن در محیطی که دود سیگار موجود است قرار نگیرید.چرا که ترکیب دود سیگار
و گازی که در لحیم کردن متصاعد میشود.سبب تولید گاز خطرناکی به نام سیانیدمی شود.،که برای سلامت انسان مضر است.
3-پس از لحیم کردن دستهای خود را بشویید.
4-پس از هر بار لحیم کردن نوک هویه خود را با اسفنجی که بوسیله آب مرطوب شده است.،تمیز کنید.
هویه ها با اندازهای 30 وات یا بیشتر در بازار موجود هستند.
هویه های با وات بالاتر ممکن است در هنگام لحیم کردن به مدارات الکترونیک یا برد شما آسیب برساند.هویه های با وات پایین نیز ممکن است رضایت شما را در لحیم کردن تامیین نکند.
هویه های 30وات برای کار شما ایده آل هستند. زمانییکه هویه گرم شد در کار کردن با آن دقت داشته باشید.که به خودتان آسیب نزنید.،پس از هر با لحیم کردن آنرا در محفظه ای که پایه هویه نامیده می شود.قرار دهید.،اگر هویه را به صورت آزاد بدون پایه هویه روی میز کارتان قرار دهید.به میز کارتان آسیب می زند.هیچ وقت با انگشتانتان گرمی نوک هویه را تست نکنید.
هنگامییکه نوک هویه را به اسفنج مرطوب شده توسط آب می زنید.،صدای جلز ولزی را می شنوید.
مراقب باشید هیچگاه قدرت وپهلوانی خود را با نوک هویه تست نکنید.
هنگام لحیم کردن پف و دودی را مشاهده خواهید کرد.قبل از لحیم کردن کمی صبر کنید.تا هویه حسابی گرم شود.سپس به لحیم کردن بپردازید.
 |
مدارات الکترونیکی
الکترییسته همواره در مسیرهای بسته جاری می شود.،برای درک مسیر بسته و مسیر باز به روشن وخاموش شدن یک LED توسط یک باطری می پردازیم.الکتریسیته از منبع تغذیه جاری شده و پس از عبور از یک مسیر هادی مثل سیم به باری مثل LED که مصرف کننده بار است می رسد.
بار در واقع انرژی الکتریسیته را به نوعی دیگر از انرژی مثل نور تبدیل می کند.
در صورتیکه کلید بسته شود جریان از منبع به سمت LED می رود.و از LED به سمت منبع برمی گردد.در صورت وجود این مسیر بسته است.،که LED روشن می شود.سیمها معمولا رابط بین باطری وبار هستند.، جنس آنها معمولا از مس یا هر فلز دیگری که در مقابل زنگ زدگی مقاوم هستند.،می باشد.برای حفاظت از مدار وجلوگیری از ارتباط مدارات به یکدیگر همواره از سیمهای روکش دار استفاده می شود.روکش سیمها معمولا از جنس پلاستیک است.وبه آن عایق(insulation)می ویند.
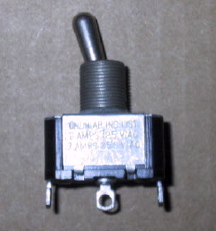
کلیدها (switch)
کلیدهاجز قطعاتی هستند که اجازه می دهند جریان از یک سمت به سمت دیگر جاری شود یا جاری نشود.در شکل زیر یک کلید سه حالته را مشاهده می کنید.شما میتوانید هر کدام از سمتهای چپ وراست این کلید را به طور مثال قسمت چپ را با یک مقاومت به یک LED سبز رنگ وقسمت راست رابا یک مقاومت به یک LED قرمز رنگ وصل کنید.پایه وسط را به منبع تغذیه وصل کنید.زمانیکه کلید به سمت چپ یا راست منحرف می شود باعث روشن شدن LED های قرمز یا سبز می شود.|
|
LED
LED مخفف سه کلمه LIGHT (نور)،emitting(ساتع کننده)،Diode است.در واقع یعنی دیودهای ساتع کننده نور،LED در واقع نوعی از نیمه هادیها هستند. که با عبور جریان از آنها در یک جهت نه هر دو جهت از خود نور ساتع می کنند.پایه بلندتر آن پایه مثبت و پایه کوتاهتر آن پایه منفی است.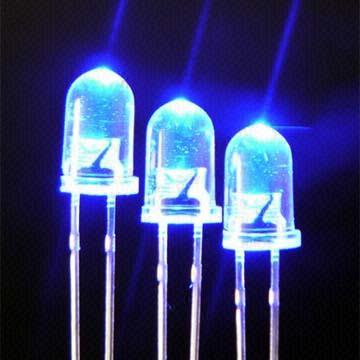 |
توان(Power)
یکی از مهمترین گزینه هایی که در زمینه طراحی روبات به آن احتیاج دارید بحث توان است.،توان در مکانیک از حاصلضرب نیرو درسرعت ایجاد می شود.
زمانیکه نیرو بر حسب نیوتن اندازه گیری می شود.،واحد آن (kg*m/s^2)است.،واحد سرعت نیز m/s
می باشد.وفرمول نیرو به صورت زیر محاسبه می شود.

m جرم و a شتاب می باشد.در واحدهای انگلیسی واحد جرم پوند(Pound)است.،و واحد نیرو lbf می باشد.
 |
فرمول توان در الکتریسیته از رابطه زیر پیروی می کند.

V ولتاژ الکتریکی و I جریان الکتریکی گذرنده از نیمه هادی است.

با جا گذاری قانون اهم در رابطه بالا فرمول زیر حاصل خواهد شد.

رابطه فوق فرمول دیگری از محاسبه توان است.که از تقسیم توان 2 ولتاژ نیمه هادی بر مقاومت آن حساب می شود.
برای فهمیدن بحث توان در ابتدا یک عدد مقاومت 1 کیلو وسپس یک عدد مقاومت 100 اهم را با یک منبع تغذیه 9 ولت سری کنید.زمانیکه مقاومت 1 کیلو را با منبع تغذیه سری می کنید و با دست خود آنرا لمس می کنید.گرمای زیادی را حس نمی کنید.اما وقتی این کار را با مقاومت 100 اهم انجام می دهید.این مقاومت فورا گرم می شود.با توجه به فرمول بالا برای مقاومت 1 کیلو توان 0.081 است و برای مقاومت 100 اهم توان 0.81 است.همانطور که مشاهده می کنید هر چه قدر مقاومت کمتر باشد.توان تولید شده در آن بیشتر است.چرا که هر چه قدر مقاومت کمتر باشد جریان عبوری از آن بیشتر است.
مقاومتها عموما 1/4 وات هستند.مقاومتها با واتهای بالاتر نیز وجود دارند.هر چه قدر وات یک مقاومت بالاتر باشد.،اندازه آن بزرگتر خواهد بود.وتحمل آن در برابر گرمای ایجاد شده از عبور جریان در آن بیشتر خواهد بود.
باتری
روباتها برای تغذیه از باتریهای خورشیدی یا باطری های معمولی استفاده می کنند.برخی نیز دارای خازنهایی با ظرفیت بالا هستند.که انرژی الکتریکی را در خود ذخیره می کنند.،و سپس این انرژی در روبات دشارژ می شود.وباطری به طور مستقیم به روبات متصل نمی شود.عموما در روباتها تغذیه موتورها بهع طور مسیتقیم و جدا از بقیه بدنه روبات داده می شود.هر چه قدر اندازه موتورها کوچکتر باشد جریانی که از آنه می گذرد.، کمتر خواهد بود.باتری ها دارای انواع مختلفی هستند.
1-باتری های رادیویی الکالینalkaline
2-باتر یهای (NiMH) ترکیب هیدروژن دار از نیکل وفلز
3-باتریهای (NiCad)ترکیب نیکل و کادمیم
باتریهای (NiMH)از باتریهای (Nicad) بهتر است چرا که گازهای سمی خطرناکی که تولید می کنند به مراتب کمتر از (Nicad)است.
در انتخاب باتری برای روبات به نکات زیر توجه کنید.
1-سایز واندازه روبات
2-عملکرد روبات
3-سرعت روبات
4-زمان شارژ ودشارژ باتری در صورت قابل شارژ بودن
باتری ها جریان و ولتاژ خروجی متفاوتی را دارند.
موفق و پیروز باشید !
آموزش ساخت ربات مسیریاب (پروگرامر)
سلام به همه!
از امروز می خوایم مباحث مربوط به میکرو کنترلر رو شروع کنیم. اگر از ابتدا با من همراه بودید یا اینکه مقالات قبل رو دنبال می کردید حتما یادتونه که چندتا پست اول مقدمات برنامه نویسی به زبان BASCOM برای میکروی AVR رو گفتم (اگر هم یادتون نیست لینکشون همین سمت راسته!). مدار ایجاد ولتاژ مناسب کار میکرو (۵ولت) با استفاده از رگولاتور رو هم که تو پست قبل به همراه لینک دانلود کامپایلر BASCOM-AVR گذاشتم (کرکش رو هم امروز آوردم ![]() ). بنابراین این جلسه می خوام نحوه ساخت پروگرمر برای میکروهای AVR رو آموزش بدم تا براحتی بتونید کدهایی که من میگم یا خودتون دارید رو روی میکرو بار کنید و بتونید به صورت کاملا عملی کار رو تجربه کنید...
). بنابراین این جلسه می خوام نحوه ساخت پروگرمر برای میکروهای AVR رو آموزش بدم تا براحتی بتونید کدهایی که من میگم یا خودتون دارید رو روی میکرو بار کنید و بتونید به صورت کاملا عملی کار رو تجربه کنید...
ساخت پروگرمر STK200300:
مدار این پروگرمر در چند نوع مختلف توسط آی سی بافر 74HC244 موجود هستش. اما مدلی رو که من الان میخوام آموزش بدم ساده ترین نوع موجود و بدون آی سی بافر هستش. برای ساخت این پروگرمر فقط به وسایل زیر احتیاج دارید:
- یک عدد سوکت ۲۵ پین، پورت Parallel یا موازی کامپوتر (از نوع نر)
- یک عدد قاب سوکت ذکر شده در صورت تمایل
- چند رشته سیم. البته پیشنهاد می کنم از سیم های فلت ۱۰ تایی استفاده کنید.
- یک عدد پایه محافظ میکرو ۴۰ پایه
- یک عدد میکروکنترلر AVR. پیشنهاد من از نوع ATmega32L/32 هستش.
- سایر موارد لازم مثل هویه، سیم قلع، فیبرمدار و....
شکل مقابل پین های سوکت پورت موازی رو با به صورت شماره گذاری از پین ۱ تا ۲۵ و نحوه اتصال  پینهای اون به پایه های میکرو نشون میده. توضیح استفاده هرکدوم از این پینها خارج از بحث ماست فقط بدونید که پینهای ۱۸تا۲۵ باید به زمین وصل بشن و پین ۲-۹ هم مربوط به ۸ بیت موازی هستند.
پینهای اون به پایه های میکرو نشون میده. توضیح استفاده هرکدوم از این پینها خارج از بحث ماست فقط بدونید که پینهای ۱۸تا۲۵ باید به زمین وصل بشن و پین ۲-۹ هم مربوط به ۸ بیت موازی هستند.
تصویر پایه های میکروی AVR به همراه اسمشون رو قبلا در پست 13 گذاشتم، ببینیدش که در درک شکل بالا خیلی کمکتون می کنه.. با این حال به علت اهمیت بازم میگم: پینهای شماره ۱۸الی۲۵ سوکت رو بهم و سپس به GND میکرو که پایه شماره ۱۱ اون هست وصل کنید و بعد پایه شماره ۱۱ میکرو رو هم به سر منفی منبع وصل کنید به همین ترتیب، پین شماره ۱۰ سوکت به MISO یا پایه ۷ میکرو، پین شماره ۹ سوکت به RESET یا پایه ۹ میکرو، پین شماره ۷ سوکت به MOSI یا پایه ۶ میکرو، پین شماره ۶ سوکت به SCK یا پایه ۸ میکرو وصل کنید و در آخر VCC یا پایه ۱۰ میکرو رو هم به سر مثبت منبع وصل کنید. بخش سخت افزاری پروگرمر شما به همین سادگی آماده شد.
برای استفاده از این پروگرمر باید به روش زیر نوع پروگرمر خودتون رو به کامپایلر BASCOM معرفی کنید:
BASCOM-AVR > Options > Programmer >> Programmer = STK200300 Programmer
بعد از انجام مراحل بالا و تکمیل پروگرمرتان برای اطمینان از صحت کار می توانید در محیط کامپای لر دگمه
لر دگمه  را فشار دهید. در صورت ظاهر نشدن پیام مقابل و نمایش صفحه ای جدید که در بالای آن مشخصات میکروی شما نوشته شده بدانید که پروگرمر شما به درستی کار می کند. در غیر این صورت تمام موارد از جملا ترتیب صحیح اتصال سیمها و وصل بودن ولتاژ مناسب و.. را چک کنید. این مرحله یکی از مراحلی است که امکان جواب ندادن در اون خیلی زیاده بنابراین در صورت جواب نگرفتن اصلا عصبانی نشید و بیاید تا با هم مشکل رو حل کنیم
را فشار دهید. در صورت ظاهر نشدن پیام مقابل و نمایش صفحه ای جدید که در بالای آن مشخصات میکروی شما نوشته شده بدانید که پروگرمر شما به درستی کار می کند. در غیر این صورت تمام موارد از جملا ترتیب صحیح اتصال سیمها و وصل بودن ولتاژ مناسب و.. را چک کنید. این مرحله یکی از مراحلی است که امکان جواب ندادن در اون خیلی زیاده بنابراین در صورت جواب نگرفتن اصلا عصبانی نشید و بیاید تا با هم مشکل رو حل کنیم ![]() .
.
اینم لینک دانلود کرک های برنامه BASCOM-AVR که سری پیش گذاشته بودم:
آموزش ساخت ربات مسیریاب (آی سی رگلاتور)
سلام بر دوستان پاک 
می خواستم از این پست آموزشهای نرم افزاری و کار با میکروکنترلر رو شروع کنم اما یادم افتاد یه بخش الکتریکی نسبتا مهم رو جا انداختم که البته بهترین زمان رو کردنش همین الان بود:
شاید بدونید که ولتاژهای عملیاتی میکروکنترلر AVR نوع ATmega32 از ۴.۵ تا ۵.۵ ولت و نوع ATmega32L از ۲.۷ تا ۵.۵ هستش، اما ولتاژ کاری موتورهای پله ای موجود در بازار معمولا ۱۲ و همچنین ممکنه منبع تغذیه ای که در اختیار داریم یا در اختیار ما میگذارن (منظورم مسابقاته!) ممکنه اصلا تو این رنج نباشه! برای ایجاد رنج دلخواه خودمون از قطعه ای بنام رگولاتور استفاده می کنیم که فعلا یه توضیح کوچیک از اون داشته باشید:
IC های رگولاتور۱: به تازگی آی-سی هایی عرضه شده که جانشین یک مدار رگولاتور شده و دارای امتیازاتی می باشد، به عنوان نمونه در صورت اتصال کوتاه شدن خروجی یا بار بیش از اندازه آی-سی محافظت شده و همچنین اگر آی-سی بسیار داغ شود مدار حفاظتی داخل آی-سی آن را خاموش خواهد کرد و این قطع ولتاژ خروجی تا زمانی ادامه پیدا خواهد کرد که آی-سی دوباره خنک شود. حجم کم این آی-سی ها نیز از امتیازات آنها به شمار می رود. در واقع وقتی شما از این IC در مدار خود استفاده کنید به میزان زیادی در وقت و پول خود صرفه جویی کرده اید. یک نمونه از این IC ها سری 78xx می باشد که سه پایه داشته و بسیار شبیه به ترانزیستور می باشد. ولتاژهای خروجی آنها نیز ثابت می باشد. بجای XX هر شماره ای روی بدنه IC نوشته شده باشد ولتاژ خروجی آن خواهد بود. جریان خروجی این IC ها یک آمپر می باشد و لازم است در این جریان رادیاتور مناسبی به IC متصل شود. در شکل زیر یک مدار رگولاتور به همراه دو خازن برای از بین بردن نوسانات نشان داده شده است. (در حالت عادی می توان خازن ها را حذف کرد)
امتیازاتی می باشد، به عنوان نمونه در صورت اتصال کوتاه شدن خروجی یا بار بیش از اندازه آی-سی محافظت شده و همچنین اگر آی-سی بسیار داغ شود مدار حفاظتی داخل آی-سی آن را خاموش خواهد کرد و این قطع ولتاژ خروجی تا زمانی ادامه پیدا خواهد کرد که آی-سی دوباره خنک شود. حجم کم این آی-سی ها نیز از امتیازات آنها به شمار می رود. در واقع وقتی شما از این IC در مدار خود استفاده کنید به میزان زیادی در وقت و پول خود صرفه جویی کرده اید. یک نمونه از این IC ها سری 78xx می باشد که سه پایه داشته و بسیار شبیه به ترانزیستور می باشد. ولتاژهای خروجی آنها نیز ثابت می باشد. بجای XX هر شماره ای روی بدنه IC نوشته شده باشد ولتاژ خروجی آن خواهد بود. جریان خروجی این IC ها یک آمپر می باشد و لازم است در این جریان رادیاتور مناسبی به IC متصل شود. در شکل زیر یک مدار رگولاتور به همراه دو خازن برای از بین بردن نوسانات نشان داده شده است. (در حالت عادی می توان خازن ها را حذف کرد)
 البته با توجه به آمپراژ خروجی رگولاتور توجه داشته باشید نباید استپ موتورمون رو به لگولاتور وصل کنیم بلکه باید ولتاژ استپر موتورمون رو به صورت مستقیم از ۱۲-ولت و تغذیه میکروکنترلر و مدار سنسورهامون رو (که قبلا نشون دادیم) از خروجی رگولاتور بگیریم.
البته با توجه به آمپراژ خروجی رگولاتور توجه داشته باشید نباید استپ موتورمون رو به لگولاتور وصل کنیم بلکه باید ولتاژ استپر موتورمون رو به صورت مستقیم از ۱۲-ولت و تغذیه میکروکنترلر و مدار سنسورهامون رو (که قبلا نشون دادیم) از خروجی رگولاتور بگیریم.
راستی پاراگراف ۱ رو عینا از روی کتاب "۵۰ مدار علمی منبع تغذیه" تالیف ناصر بهنوا نوشتم. در این مقاله می خواستم با بستن مدار رگولاتور، از پست بعد که کار با میکرو رو شروع می کنم دیگه مشکل تغذیه میکرو رو نداشته باشید. که البته جلسه بعد دوباره در مورد پایه های میکرو بیشتر توضیح خواهم داد.
اینم لینک کامپایلر BASCOM برای دانلود! پس دیگه تمام مواد لازم برای آموزشهای میکروکنترلر کاملا محیاست:
نظر یادتون نره !
Adapted from E.l.e.B.o.y.s
آموزش ساخت ربات مسیریاب (درایور)
سلام!
علت تعدد سیمهای استپر موتور رو فهمیدیم و دونستیم چطور باید این سیمها ۰ و ۱ بفرستیم تا باعث حرکت موتور بشیم. همچنین در قسمتهای اولیه آموزش ساخت ربات (میکروکنترلر) فهمیدیم که میکرو دارای تعدادی پورت هستش که هر کدوم از این پورتها از ۸ تا بیت تشکیل شده و میشه این بیتها رو تغییر داد (۰ و ۱ کرد). خوب حالا حتما فکر می کنید میشه چهارتا سیم موتور رو به چهارتا پین از یه پورت (دلخواه) میکرو وصل کنیم و با تغییر متناوب بیتها (۰۰۰۱ ، ۰۰۱۰ و...) می تونیم باعث چرخش موتورمون بشیم.
اما واقعیت اینه که کمتر مصرف کننده ای رو میشه به صورت مستقیم به پایه های میکرو وصل کرد. علتش هم اینه که شایه های میکرو نمی تونن بیشتر از ۲۰ میلی آمپر رو سینک کنند (عبور بدن).
برای مثال فرض کنید یک LED داریم با آمپراژ مصرفی 50mA ، اگر سر مثبت اون رو به ولتاژ وصل کنیم و سر منفی اون رو به یه پین از میکرو وصل کنیم و اون پین رو صفر کنیم (به معنی GND کردن اون) باعث سوختن حداقل همون پین میکرومون میشیم. این بخاطر جریان کشیدن بیش از توان میکرو هستش، برای همین باید بین پین و پایه منفی LED یا پایه LED و سر مثبت منبع یه مقاومت مناسب قرار بدم. همین اتفاق در مورد استپر موتور صادقه فقط با مقیاس بزرگتر که دیگه جای شبه ای باقی نمیزاره به سوسک شدن میکروتون ![]() .
.
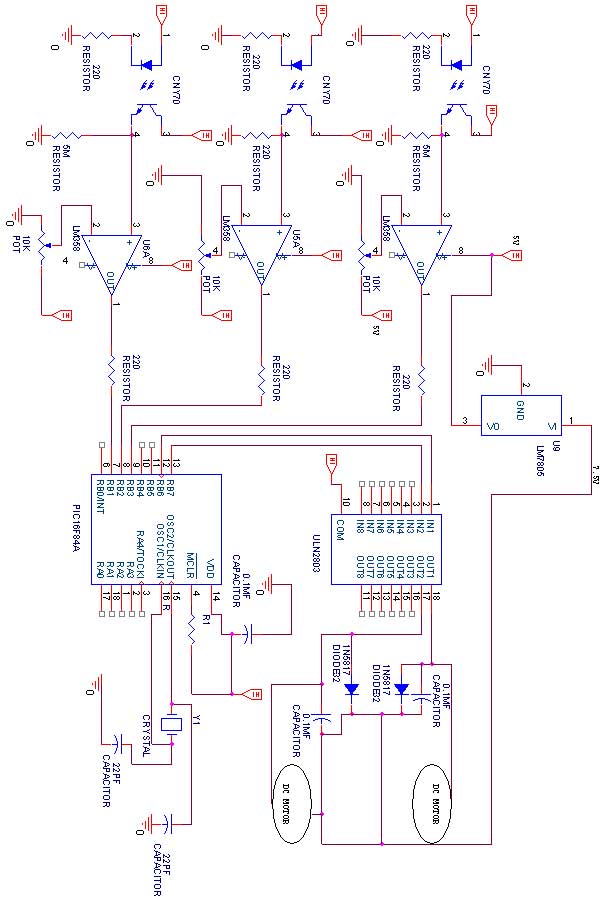
برای جلوگیری از این پدیده از آیسی های رابط مخصوصی استفاده می کنند که اصتلاحا درایور نام دارند. باوجود تنوع زیاد درایور ها من از مدل ULN2803 که فکر می کنم یکی از رایجترین نوع برای ساخت ربات مسیریاب هستش استفاده می کنم. این درایور دارای ۱۸ پایه هستش. همونطور که در شماتیک درونی IC مشاهده می کنید پایه ۹ سر gnd و پایه ۱۰ سر vcc هستش و پایه های ۱ تا ۸ ورودی (در اینجا از میکرو) و پایه های ۱۱ تا ۱۸ خروجی (در اینجا به موتور) این آی سی هستند. در شکل نحوه رابط قرار دادن این آی سی بین ۴ پایه میکرو و ۴ سیم موتور رو مشاهده می کنید. راستی در این IC، پایه ۱۸ خروجی پایه ۱، پایه ۱۷ خروجی ۲، ۱۶ خروجی ۳ و... می باشد.
نام دارند. باوجود تنوع زیاد درایور ها من از مدل ULN2803 که فکر می کنم یکی از رایجترین نوع برای ساخت ربات مسیریاب هستش استفاده می کنم. این درایور دارای ۱۸ پایه هستش. همونطور که در شماتیک درونی IC مشاهده می کنید پایه ۹ سر gnd و پایه ۱۰ سر vcc هستش و پایه های ۱ تا ۸ ورودی (در اینجا از میکرو) و پایه های ۱۱ تا ۱۸ خروجی (در اینجا به موتور) این آی سی هستند. در شکل نحوه رابط قرار دادن این آی سی بین ۴ پایه میکرو و ۴ سیم موتور رو مشاهده می کنید. راستی در این IC، پایه ۱۸ خروجی پایه ۱، پایه ۱۷ خروجی ۲، ۱۶ خروجی ۳ و... می باشد.
البته همونطور که در قسمت کنترل استپ موتور اشاره  کردم بیت های ارائه شده در جدولهای پست قبل باید به صورت نقیض به موتور ارسال بشن. مثلا ۰۰۰۱ که از میکرو میاد باید به صورت ۱۱۱۱۰ به موتور ارسال بشه، چون می خواهیم سیمهای استپر رو به ترتیب ۱ های جدول GND کنیم و صفر به معنی GND هست نه ۱ (قبلا کفته بودم) !!! یکی از کارهای مهم این IC هم همین هستش و خروجی های میکروی مارو که طبق جدول های پست قبل هست نقیض (NOT) میکنه و به موتور میفرسته.در ضمن از اونجایی که این درایور ۸ تا ورودی و ۸ تا خروجی داره، ما میتونیم هر دوتا موتورمون رو (برا مسیریاب ۲ تا استپر موتور لازم داریم) فقط با یه درایور راه بندازیم. ۴ تا ورودی و ۴ تا خروجی برای ۱ موتور و یه جفت ۴ تایی باقی مونده هم برای موتور دوم. مثل شکل قبل.
کردم بیت های ارائه شده در جدولهای پست قبل باید به صورت نقیض به موتور ارسال بشن. مثلا ۰۰۰۱ که از میکرو میاد باید به صورت ۱۱۱۱۰ به موتور ارسال بشه، چون می خواهیم سیمهای استپر رو به ترتیب ۱ های جدول GND کنیم و صفر به معنی GND هست نه ۱ (قبلا کفته بودم) !!! یکی از کارهای مهم این IC هم همین هستش و خروجی های میکروی مارو که طبق جدول های پست قبل هست نقیض (NOT) میکنه و به موتور میفرسته.در ضمن از اونجایی که این درایور ۸ تا ورودی و ۸ تا خروجی داره، ما میتونیم هر دوتا موتورمون رو (برا مسیریاب ۲ تا استپر موتور لازم داریم) فقط با یه درایور راه بندازیم. ۴ تا ورودی و ۴ تا خروجی برای ۱ موتور و یه جفت ۴ تایی باقی مونده هم برای موتور دوم. مثل شکل قبل.
ایشالله از جلسات بعد با میکرو کار خواهیم کرد. پس فعلا بای ![]()
موتور پله ای ۳
سلام بچه هااگر چهار پله d, c ,b ,a رو که هر کدوم به صورت چهار بیت در جدول نشون داده ش
| سیم۱ | سیم۲ | سیم ۳ | سیم ۴ | شماره پله |
| 0 | 0 | 0 | 1 | 1 |
| 0 | 0 | 1 | 0 | 2 |
| 0 | 1 | 0 | 0 | 3 |
| 1 | 0 | 0 | 0 | 4 |
نو دیگری از القا پله به موتور وجود داره که حرکت دوبیتی نام داره. هم
| سیم۱ | سیم۲ | سیم ۳ | سیم ۴ | شماره پله |
| 1 | 0 | 0 | 1 | 1 |
| 0 | 0 | 1 | 1 | 2 |
| 0 | 1 | 1 | 0 | 3 |
| 1 | 1 | 0 | 0 | 4 |
نوع دیگری از القا پله به استپ موتور وجود داره بنام
| سیم۱ | سیم۲ | سیم ۳ | سیم ۴ | شماره پله |
| 0 | 0 | 0 | 1 | 1 |
| 0 | 0 | 1 | 1 | 2 |
| 0 | 0 | 1 | 0 | 3 |
| 0 | 1 | 1 | 0 | 4 |
| 0 | 1 | 0 | 0 | 5 |
| 1 | 1 | 0 | 0 | 6 |
| 1 | 0 | 0 | 0 | 7 |
| 1 | 0 | 0 | 1 | 8 |
لازم به ذکره که اگر بیت های این سه جدول رو از بالا به پایین القا کنیم موتور در جهت ساعتگرد و اگر از پایین به بالا اجرا کینم در جهت پادساعتگرد خواهد چرخید. نحوه اعمال این بیتها به موتور توسط میکروپروسسور رو در پستهای بعدی شرح خواهم داد.
نظر پیشنهاد و انتقاد (که نمی پذیریم ![]() ) یادتون نره! فعلا یا حق.
) یادتون نره! فعلا یا حق.
Adapted From E.l.e.B.o.y.s