آموزش علم رباتیک
در این وبلاگ مطالبی آموزشی در مورد ساخت ربات و اخبار مسابقات رباتیک خواهیم داشت!آموزش علم رباتیک
در این وبلاگ مطالبی آموزشی در مورد ساخت ربات و اخبار مسابقات رباتیک خواهیم داشت!تاریخچه ی میکرو پرسوسور و کاربرد
مقدمه:
تغییر سیستمهای مکانیکی و برقی به سیستمهای الکترونیکی در بیشتر تکنولوژیهای عمده، سیستمهای الکترونیکی جایگزین بخشهای مکانیکی شده و از آن پیش افتادهاند. سیستم تلفن در اصل مجموعهای از اجزای مکانیکی (یعنی سیستم شمارهگیر) بود که در آن حرکت فیزیکی به علائم الکتریکی تبدیل میشد. با وجود این، امروزه تلفن تماماً الکترونیکی است ؛ امروزه چاپ الکترونیکی شده است. تلویزیون، کامپیوتر و بسیاری از ابزارهای دیگر نیز که در زندگی روزمره از آن استفاده میکنیم همین گونهاند. سیستمهای الکترونیکی مسلماً یک سره بر تکنولوژی فکری متکی هستند زیرا محاسبات ریاضی و نوشتن نرمافزار و برنامهها کارکرد آنها را ممکن میگرداند.
یکی از برجستهترین تغییرات، کوچک شدن وسایلی است که هادی برق هستند یا تکانههای برقی را منتقل میکنند. وسایل اولیه مانند لامپهای خلاء که در رادیوهای قدیمی دیده میشود حدود 5 تا 10 سانتیمتر ارتفاع داشتند. اختراع ترانزیستور تغییری شگرف را به دنبال داشت: توانایی تولید وسایل میکروالکترونیک با صدها کارکرد از جمله کنترل، تنظیم، هدایت و حافظه که میکروپرسسورها به اجرا درمیآورند. در آغاز هر تراشه 4 کیلو بایت حافظه داشت که بعدها به 8، 16، 32، 64 کیلو بایت افزایش یافت و امروزه سازندگان میکروپروسسور تراشههایی تولید میکنند که ظرفیت ذخیرهسازی آنها چندین مگابایت یا حتی گیگا (میلیارد) بایت است.
امروزه یک تراشهی ریز سیلیکنی(میکروپروسسور) حاوی مدارهای الکترونیکی دارای صدها هزار ترانزیستور و همهی اتصالات لازم و بهای آن فقط چند دلار است. مداربندی روی این تراشه میتواند خود میکروکامپیوتری باشد با ظرفیت پردازش ورودی / خروجی و حافظهی دستیابی تصادفی و... .
اولین میکروپروسسور:
میکروپروسسور: پس از پیدایش الکترونیک دیجیتال و جنبه های جذاب و ساده طراحیهای دیجیتال و کاربردهای فراوان این نوآوری، با تکنولوژیهای SSI , MSI ، ادوات الکترونیک دیجیتال، مانند قطعات منطقی به بازار ارائه شد. شرکت تگزاس اولین میکروپروسسور 4 بیتی را با فن آوری 2SI طراحی و عرضه نمود که بعنوان بخش اصلی ماشین حساب مورد استفاده قرار گرفت و این گام اول در پیدایش و ظهور میکروپروسسورها بود.
BIOSوکاربرد میکروپرسسوردر کامپیوتر:
یکى از متداول ترین کاربردهاى Flash memory در سیستم ابتدایى ورودى / خروجى (basic input/output system) کامپیوتر است که معمولاً به BIOS شناخته مى شود. وظیفه BIOS که تقریباً روى هر کامپیوترى وجود دارد،آن است که مطمئن شود تمام قطعات و اجزاى افزارى یک کامپیوتر در کنار یکدیگر به درستى کار مى کنند . هر کامپیوترى در قلب خود براى پردازش درست اطلاعات شامل یک میکروپروسسور است . میکروپروسسور قسمت سخت افزارى کار است. براى انجام درست کار ، به نرم افزار نیز احتیاج است. هر کاربرى با دو نوع نرم افزار آشنا است:سیستم عامل و نرم افزارهاى کاربردى. BIOS نوع سوم نرم افزارى است که کامپیوتر شما براى
اجراى درست به آن نیازمند است.
BIOS چه کارى انجام مى دهد: نرم افزار BIOS مجموعه اى از وظایف مختلف را بر عهده دارد، ولى مهم ترین آنها اجراى سیستم عامل است. وقتى یک کامپیوتر روشن مى شود، میکروپروسسور سعى مى کند اولین دستورات را اجرا کند. ولى نکته در این است که این دستورات باید از جایى به میکروپروسسور اعلام شود. گرچه سیستم عامل روى هارد وجود دارد، ولى میکروپروسسور نمى داند اطلاعات در آنجاست. BIOS دستورات اولیه را براى این دسترسى به میکروپروسسور اعلام مى کند.
کاربرد میکروپروسسوردرانواع کارتهای هوشمند :
کارتهای هوشمند ((DRAC|TRAMSکارتهایی هستند که از یک قسمت پلاستیکی تشکیل گردیده اند که در داخل آنها یک چیپ میکروپروسسور ( PIHCROSSECORPORCIM) قرار دارد و اطلاعات لازم روی این چیپها قرار می گیرند. میزان و تنوع اطلاعاتی که در کارت ذخیره می گردد، به توانایی چیپ داخل آن بستگی دارد.
انواع مختلف کارتهای هوشمند که امروزه استفاده می شود، کارتهای تماسی ، بدون تماسی و کارتهای ترکیبی هستند.
کارتهای هوشمند تماسی بایستی در داخل یک کارت خوان قرار داده شوند. این کارتها یک محل تماس روی صفحه دارند که تماسهای الکترونیکی را برای خواندن ونوشتن روی چیپ میکروپروسسور )زمانی که در داخل کارت خوان قرار دارد(، فراهم می آورد. نمونه این کارتها در زندگی روزمره بسیار به چشم می خورد.
کارتهای بدون تماس ، یک آنتن سیم پیچی درون خود دارا هستند که همانند چیپ میکروپروسسور درداخل کارت ، گنجانده شده است . این آنتن درونی اجازه انجام ارتباطات و ردوبدل کردن اطلاعات را فراهم می آورد. برای چنین ارتباطی ، بایستی علاوه بر اینکه زمان ارتباطکاهش یابد، راحتی نیز افزایش پیدا کند..
کارتهای ترکیبی ، به عنوان هم کارتهای تماسی و هم کارتهای بدون تماس عمل می کنند و در حقیقت داخل این نوع کارتها هم چیپ الکترونیکی و هم آنتن وجود دارد وچنانچه کارت خوان وجود داشته باشد از کارت خوان می توان استفاده کرد و چنانچه وجود نداشته باشد، از آنتن کارت می توان ارتباط را برقرار کرد.
شاید این سوال پیش آید که چرا از کارتهای هوشمند )کارتهای حافظه دار( به جای کارتهای مغناطیسی استفاده می شود؟
پاسخ این است که ذخیره سازی اطلاعات در کارتهای هوشمند و میکروپروسسور دارهزار مرتبه بیشتر ازکارتهای مغناطیسی است . مزیت دیگر اینکه این کارتها از سرعت ذخیره سازی بالا ومکانیسم های ایمنی قویتری برخوردارند.
میکروپروسسور درکنترل فرکانس :
520B یک دستگاه فرکانس متوسط است که بوسیله میکروپروسسور کنترل می شود، دارای نمایشگر LCD یا (Liquid Crystal Display و دو خروجی می باشد.
کنترل های تاچ سوییچ و نمایشگر LCD این امکان را به استفاده کننده می دهد که با سرعت و دقت پارامترها را انتخاب کرده و بر روی نمایشگر LCD به وضوح مشاهده نماید. تراپیست به سرعت با کنترل ها آشنا شده و از سهولت استفاده در درمانهای کلینیکی لذت خواهد برد.
خصوصیات منحصر به فرد :
520B مانند هر دستگاه اینترفرنشیال می تواند به صورت دو الکترودی، چهار الکترودی، چهار الکترودی با سیستم وکتوراسکن مورد استفاده قرار گیردوآن به خاطر کنترل آن به وسیکه ی میکروپروسسور است. اما آنچه این دستگاه را متمایز می سازد جریان های کاملاً اختصاصی است.
میکرو پروسسور در دستگاههای کارت خوان :
این سیستم با استفاده از کارت-بلیت هوشمند بدون تماس قادر به ثبت اعتبار مالى و دیگر اطلاعات دارنده کارت مىباشد. و موارد استفاده ی آنها در این مکانهایی است .
· مترو،· اتوبوسرانى،· عوارض اتوبان
· تعاونى فرهنگیان،· تسهیلات رفاهى و بُن کارمندى
· مراکز تفریحى و باشگاههاى ورزشى
· شناسنامه پزشکى بیمار
· سلف سرویس دانشگاهها و ادارات
· پارکینگها
· کارت تلفن،· پارکومتر،· جایگاههاى سوختگیرى
مشخصات سختافزاری دستگاه:
· میکروپروسسور: 16 بیت
· پردازنده رمزنگار کمکى
· ارتقاء خودکار نرم· افزارى با فلاش بایوس (منحصر بفرد در ایران)
· حافظه: 512Kb اصلى و 512Kb براى Bios
· بازسازى هوشمند اطلاعات کارت
· سازگارى ساختار کارت با استاندارد بین· المللى
· ذخیره· سازى دوگانه اطلاعات براى بازیافت اضطرارى
· رابط: RS232, RS422 و مودم (RS485 بنا به سفارش)
· پورت چاپگر
· مجهز به UPS داخلى جهت کار هنگام قطع برق
· باترى پشتیبان براى نگهدارى اطلاعات
· 2 رله براى کنترل چراغ سبز و قرمز (و آژیر)
· نمایشگر با کیفیت· FSTN داراى لامپ· پس· زمینه·
· امکانات جانبی: اتصال به راه· بند،· نمایشگر بزرگ بیرونى،· صفحه· کلید بیرونى
مشخصات کارت:
· چیپ MIFARE
· ابعاد: ISO 7816
· حافظه: 1024 بایت (*8 BIT) EEPROM
· عمر خدماتى چیپ: 100000 بار نوشتن،· 10 سال حفظ اطلاعات
microtak ![]()
مقایسه انواع موتور و درایورها
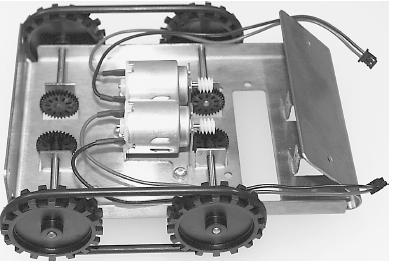
مقایسه انواع موتور و درایورهایکی از مهمترین اجزای یک ربات بخش مکانیکی و سیستم تولید کننده نیروی محرکه آن می باشد.
از موتور برای تبدیل انرژی الکتریکی به انرژی مکانیکی استفاده میشود.
بسته به کارکرد ربات ، توان مصرفی ، دقت لازم و پارامترهایی از این قبیل نوع موتور ربات انتخاب می شود. بی شک یکی از مشخصه های اصلی موفقیت یک ربات انتخاب صحیح موتور محرک ربات می باشد. در یک دسته بندی کلی سه نوع موتور الکتریکی وجود دارد:
· موتور AC
· موتور DC
· موتور پلهای (Stepper motor)
در این گفتار تنها به بررسی اجمالی خصوصیات این سه نوع موتور و مقایسه آنها اشاره خواهد شد:
موتور AC
· معمولاً در مدارهایی با مصرف انرژی زیاد و دستگاههای الکتریکی خانگی مورد استفاده قرار میگیرد.
· این موتورها با جریان متناوب برق کار میکنند لذا به آنها موتور AC گفته میشود. یخچال ، جاروبرقی و آبمیوه گیری موتور AC دارند.
· مکانیسم کنترلی موتورهایAC تقریباً پیچیده است.
· برای کنترل میزان چرخش موتور از وسیلهای به نام شیفت انکودر استفاده میشود.
موتور DC
· توان مکانیکی آنها عموماً کمتر از موتورهای AC است.
· موتورهای DC ساختار سادهای دارند.
· بسیاری از اسباب بازیهای برقی با موتور DC کار میکنند.
· آرمیچر بارزترین نوع موتور DC است.
· اغلب برای استفاده از موتورDC به مدار راهانداز نیاز داریم.
· برای چرخش یکنواخت موتور DC فقط کافیست تغذیه موتور با یک ولتاژ DC صاف (رگوله( مثل باطری تأمین شود.
· ایراد موتور DC عدم امکان کنترل دقیق سرعت و چرخش موتور است. برای امتحان این موضوع کافیست تغذیه یک آرمیچر در حال چرخش را قطع کنید و مشاهده کنید که مدتی طول می کشد تا آرمیچر بطور کامل از حرکت باز ایستد.
· قیمت پایین، تنوع قدرت و سرعت، از جمله مزایای استفاده از موتورهای DC میباشد.
موتور پلهای (Stepper motor)
· استپ موتور نوعی موتور مثل موتورهای DC است که حرکت دورانی تولید می کند. با این تفاوت که استپ موتورها دارای حرکت دقیق و حساب شده تری هستند.
· این موتورها به صورت درجه ای دوران می کنند و با درجه های مختلف در بازار موجود هستند.
· موتورهای پله ای موجود در بازار معمولا در دو نوع ۵ یا ۶ سیم یافت می شود.
· موتور دیسک سخت یک نمونه موتور پلهای است.
· کاربرد اصلی این موتورها در کنترل موقعیت است.
· این موتورها ساختار کنترلی سادهای دارند. لذا در ساخت ربات کاربرد زیادی دارند. بطوریکه به تعداد پالسهایی که به یکی از پایههای راه انداز آن ارسال میشود موتور به چپ یا راست میچرخد.
· توان خروجی این موتورها کمتر از دو نوع قبلی است.
· استفاده از موتور پلهای مشکلاتی از جمله وزن زیاد، قیمت بالا و قدرت بسیار کم را بدنبال دارد.
اصول کار موتور پلهای
· واژه پله به معنی چرخش به اندازه درجه تعریف شده موتور است.
مثلاً موتور پلهای با درجه ۱.۸ باید ۲۰۰ پله حرکت کند تا ۳۶۰ درجه یا یک دور کامل بچرخ د: ۱.۸X۲۰۰ =۳۶۰
· یک استپ موتور با درجه ۱۵ فقط باید ۲۴ پله برای یک دور کامل انجام دهد : ۲۴X۱۵=۳۶۰
به این ترتیب هرچه تعداد پلههای یک موتور بیشتر باشد دقا چرخش آن افزایش مییابد.
· مکانیسم کنترلی موتور پله ای طوریست که امکان کنترل سرعت به سادگی میسر می شود.
موتور پله کامل و نیم پله
· در حالت عادی میزان چرخش موتور به تعداد پالسهای اعمالی و گام موتور بستگی دارد. هر پالس یک پله موتور را میچرخاند.
· با تحریک دو فاز مجاور در موتور میتوان موتور را به اندازه نیم پله حرکت داد. به این ترتیب تعداد پلههای موتور دو برابر میشود و در نتیجه دقت چرخش موتور هم دوبرابر می گردد.
راه اندازی موتور پلهای
· تراشه L297 یک راه انداز مناسب برای موتور پلهای است.
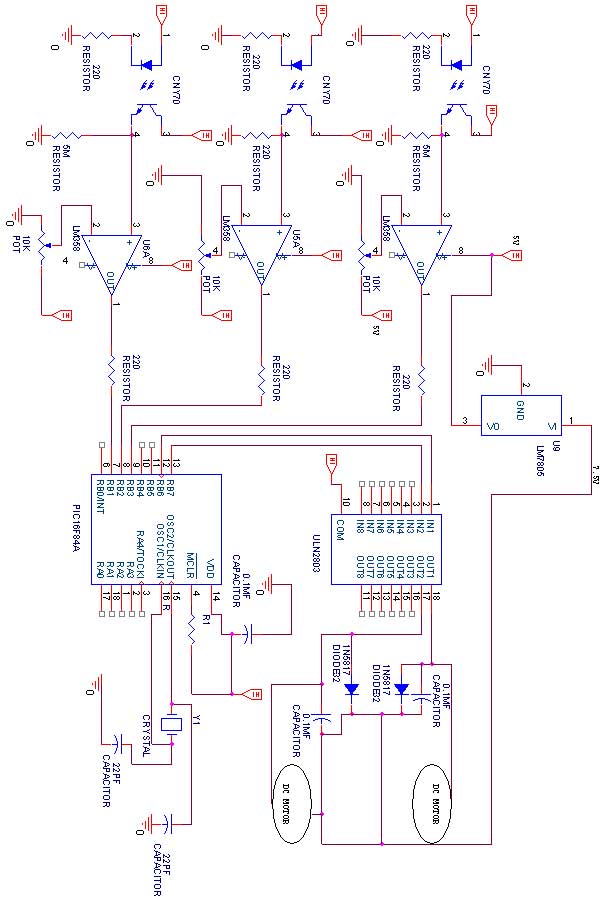
· مدارهای راهانداز متنوعی برای استفاده از موتورهای پلهای وجود دارد. در اینجا از مدارمجتمع L297 و L298 برای راهاندازی موتور پلهای استفاده میشود. که طریقه بستن آن در شکل زیر نشان داده شده است.
· جهت کنترل موتور به قابلیت هایی همچون حرکت به عقب و جلو، کنترل سرعت، کنترل جریان و توقف آنی موتور احتیاج داریم و این نیازها را درایور مورد نظر ما یعنی L298 براحتی تامین می نماید. L298 یک آیسی پل-H دوتایی ( DUALH-Bridge) دارای ۱۵ پایه میباشد که قادر است وظایفی چون چرخش موتور به عقب و جلو، کنترل سرعت، کنترل جریان و توقف آنی موتور را انجام دهد. کنترل موتور به این شرح است که پس از محاسبه میزان چرخش موتور برای جابجایی مورد نظر با استفاده از میکرو کنترلر به تعداد مورد نظر پالس به پایه راه انداز ارسال میکنیم.
· یک پایه برای تعیین جهت چرخش (ساعتگرد و پاد ساعتگرد) مورد استفاده قرار میگیرد.
· پایه Enableمدار راهانداز را فعال و غیر فعال مینماید.
مقایسه موتور DCو موتور پلهای
· برای کسب اطلاعات بیشتر در مورد نحوه کارکرد انواع موتورها و دیگر مسایل مورد نیاز جهت ساخت ربات می توانید برنامه های آموزشی شبکه آموزش با عنوان "آموزش ساخت ربات" را که ویژه برگزاری همین مسابقات تولید شده است، دنبال کنید.
منبع: http://www.nurc.ir/
آموزش برنامه نویسی میکروکنترلر
اطلاعیه
سلام یه خبر خوب از اونجا که خیلی ها دوست دارن برنامه نویسی رو یاد بگیرن من هم می خوام چیزایی که بلدم رو یاد بدم اما تو یه وبلاگ اینهمه کار نمیشه کرد یک نفره هم نمیشه
بهین دلیل از همه (چه مرد چه بازم مرد) دعوت میشه که با ما همکاری کنند
دعوت میشه که با ما همکاری کنند
حالا برا اینکه بفهمم شما موافقید تو نظرات اعلام کنید.
یکم کمک
سلام راستش اینقدر ذوق داشتم یادم رفت خودمو معرفی کنم
من سید علی حسینی هستم اهل مشهد هم هستم علاقمم avr ه
بریم سره اصل مطلب خوب امروز یه مقاله ی خوب که به دردتون بخره از اسماعیل صابری
براتون اوردم لینک اصلی مطلب
http://www.irankorea.com/microlearn/microlearn-about42.html
خود مطلب:
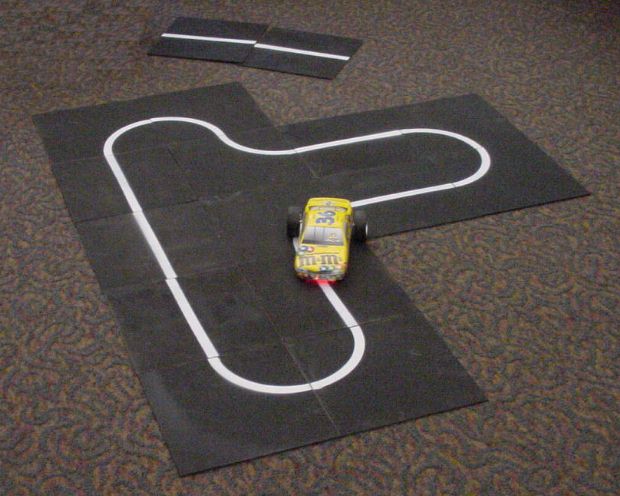
«یک ربات باید عالی کار کند... اگر 1000 بار عملکردش را امتحان کنید و بدون نقص باشد و تنها یک هزارم درصد احتمال اشتباه داشته باشد، مطمئن باشید این اشتباه حتما در مسابقه رخ می دهد!» این جملات ، بخشی از گفته های یکی از رباتیست های جوان تیم روبوتیک دبیرستان علامه حلی تهران است. پنج رباتیستی که باوجود سن کمشان موفق به طراحی و ساخت یک ربات فوتبالیست با قابلیت های پیشرفته حفظ توپ شده اند. متاسفانه در مسابقه های روبوکاپ سال گذشته ، که در ایتالیا برگزار شد، بخت با این جوانان خلاق و مستعد یار نبود و به دلیل مشکل فنی که برای رباتشان پیش آمد، از دور مسابقه حذف شدند و هم اکنون خود را برای شرکت در مسابقه های 2004 پرتغال آماده می کنند. با آن که در کشور ما حمایت های مالی چندانی از سوی نهادهای دولتی و بخصوص صنایع از پژوهشگران صورت نمی گیرد، این ذهنهای برجسته با کمترین امکانات به ابتکارات بزرگ نایل می شوند و برای خود و کشورشان افتخاراتی ارزشمند می آفرینند. امید است ، بتوانیم با اطلاع رسانی صحیح در روند فرهنگ سازی در صنایع کشور که بر محور نزدیکی و همکاری بخش صنعت و تحقیقات و پژوهش های علمی استوار است ، موثر باشیم... نقش برگزاری مسابقه هایی چون ربوکاپ در دنیا، فرهنگ سازی و ایجاد باور و انگیزه در صنایع برای حمایت از تحقیقات بخصوص در زمینه رباتیک است ، زیرا تا زمانی که استعدادهای برجسته ای که در این سری مسابقه ها شناسایی می شوند، مورد حمایت صنایع قرار نگیرند، مجالی برای بروز واقعی نمی یابند. فرزاد صمدی ، معاونت پژوهشی دبیرستان علامه حلی می گوید: بحث ربات سازی دو سه سالی است که در مدرسه آغاز شده است. البته بچه ها در آغاز از طراحی و ساخت موشهای هوشمند مسیریاب و بارکد خوان شروع کردند و هم اکنون موفق به طراحی و ساخت مدارها، سیستم مکانیکی و الکترونیکی رباتهای فوتبالیست با قابلیت ویژه جهت یابی و مکان یابی در زمین شده اند و خود را برای شرکت در مسابقه های 2004 پرتغال آماده می کنند. وی به نکته جالبی اشاره می کند: «متاسفانه والدین نسبت به فعالیت فرزندانشان در زمینه های تحقیقاتی و پژوهشی توجیه نشده اند و به همین دلیل ، این گونه فعالیت ها را عامل افت تحصیلی بچه ها تلقی می کنند و این دیدگاه برای این استعدادهای ویژه مانع ایجاد می کند. در کنار این مساله، عدم حمایت مالی صنایع در کشور ما نیز عامل بازدارنده قوی محسوب می شود، به گونه ای که تا وقتی فرهنگ سازی برای همکاری بخش صنعت از تحقیقات صورت نگیرد، این بچه ها با تمام خلاقیت و نوآوری، امکان بالندگی و رشد نخواهند یافت. ربات و دروازه حریف را تشخیص می دهم یکی از ویژگی های خاص ربات فوتبالیستی که از سوی تیم روبوتیک دبیرستان علامه حلی طراحی و ساخته شده با سایر رباتهای مشابه خارجی که در آخرین دوره مسابقه های قبلی روبوکاپ شرکت کرده بودند مربوط به سیستم مکان یابی و جهت یابی آن است. اشکان راشدی از اعضای تیم روبوتیک دبیرستان علامه حلی می گوید: زمین بازی روباتها با طیف سیاه یا سفید شروع و یا ختم می شد. بدین ترتیب ، یکی از روشهای تشخیص موقعیت ربات ، استفاده از سنسورهای آلتراسونیک است که امواج صوتی را می فرستد و از زمان برگشت این امواج ، فاصله ها را تشخیص می دهد. اکثر رباتهایی که تاکنون در مسابقه ها شرکت کرده اند، قادر به تشخیص رباتهای حریف یا دروازه حریف از خودی نیستند و به طور اتفاقی به دروازه حریف گل می زنند، در حالی که ما با قرار دادن دوربین کوچکی بر روی هر ربات که با پردازش تصاویر ارسالی براساس رنگ زمین ، فرمان های لازم را به بخشهای حرکتی ربات می دهد این مشکل را حل کرده ایم. وی ادامه می دهد. در سیستم جهت یابی ابتکاری این ربات صرفا از یک دوربین دیجیتال ICD دار و یک سنسور نوری (فتوسل) که هر دو روی ربات نصب می شوند، استفاده شده است که با توجه به تفاوت شدت رنگ دروازه و دیواره های جانبی در زمین های روبوکاپ که شدت رنگ آنها از یک طرف زمین به طرف دیگر بتدریج تغییر می کند حسگر نوری ربات می تواند براحتی جهت دروازه را تشخیص دهد و با توجه به تفاوت محسوس ابعاد دروازه و رباتها، حتی در صورت مشابهت رنگ رباتهای حریف با دروازه ، احتمال بروز اشتباه در سیستم جهت یابی طراحی شده کاملا متنفی است. در این سیستم ، ربات پس از رویت دروازه ، اندکی به عقب می رود و با توجه به جهت تغییر شدت رنگ ، دروازه خودی را از حریف تشخیص می دهد.
حفظ توپ در 2 سانتی متری ربات
مزیت دیگر این ربات فوتبالیست ، در بخش سیستم جاروب کننده و نگهدارنده توپ SPINBACK آن است.
ربات طراحی شده می تواند توپ 8سانتی متری مسابقه های فوتبال ربات ها را در 2 سانتی متری خود حفظ کند. رباتهای مشابه خارجی تا آخرین دوره مسابقه های قبلی روبوکاپ از چنین قابلیتی برخوردار نبوده اند.
راشدی با اشاره به این که رباتهای دیگر قادر به شوت کردن توپ نیستند، می گوید: ربات ها با استفاده از یک سیستم لونوئید و استفاده از یک میدان مغناطیسی، توپ را به سمت داخل می کشد و با حرکت مکانیکی شوت می کند؛ بعد از تشخیص توپ ، ربات حول محور خود شروع به چرخش می کند، تا این که دوربین پشت ربات به رنگ خاکستری پشت دروازه برسد و بدین ترتیب ، به عقب بر می گردد و با تعریفی که از قبل برایش شده رنگ دروازه خودی را از حریف تشخیص می دهد و بر اساس آن شوت می کند.
مغزی که بهتر تصمیم می گیرد
علیرضا یاوری از دیگر اعضای تیم ربوتیک می گوید: به وسیله چند عملگر تقسیم کاری در سیستم مغز مرکزی ربات ایجاد کرده ایم.
بدین ترتیب میزان اشتباه در سیستم الکترونیکی ربات بسیار کاهش یافته است.
بعلاوه با ترکیب اجزای سخت افزاری ، مغز ربات در شرایط مختلف کنترلی و تنظیم سرعت ، بهتر تصمیم خواهد گرفت.
محمد شمالی نیز با اشاره به تغییراتی که در سیستم حرکتی ربات بر مسابقه های سال 2004 صورت گرفته ، می گوید: در این سیستم ربات می تواند انواع و اقسام حرکات بیضوی ، مخروطی را انجام دهد و با حداکثر شتاب و سرعت به نقطه دلخواه برسد.
بعلاوه با استفاده از سیستم چرخشی OMNI ربات کنترل بهتری روی توپ خواهد داشت ، موتورها نسبت به سال قبل عوض شده و قطعات جانبی آن کاهش یافته است.
در یک کلام
با بهره گیری از سیستم هایی که سرعت و کنترل بیشتری روی توپ خواهد داشت ، امیدواریم در هر 10 حرکت به جای یک تا 2 گل 4 تا 5 گل بزنیم و بدین ترتیب ، از مسابقه های سال آینده با دست پر بازگردیم
آدرس انجمن: www.microlearn.co.sr
کنکور!!!
سلام !
البته بعد از ۲ ماه ...
سرمون حسابی شلوغه کنکوره و بدبختیاش ... این کنکورم شد باعث اینکه ( متاسفانه) دیگه نتونم بیام و بنویسم (البته برای شما خوشبختانه !
از طرفی چون این وبلاگ یه کمی بازدیدکننده داره خیلی ها اومدن گفتن که چرا ادامه نمیدی ! بعداز کلی تست و امتحان قرعه این وبلاگ به نام علی آقا در آمد و ایشان فعلا مدیر این وبلاگ هستن (البته منم نظارت خودمو دارم .)!
از قبال ایشون مطمینم که حتما به ارزش های این وبلاگ اضافه می کنه....
منم احتمالا هر ماه یک پست غیر آموزشی مثل همین خواهم داشت ..........
در مورد اون کسایی که میل زدن وراهنمایی در مورد مسیریاب خواسته بودنخواستم بگم الان تو سایت ایران رباتیک یه کیت آموزشی خیلی خوب دیدم که برای تازه کار ها (البنه سرور ما هستن ) خیلی مفیده حتما تهیه کنید ....
موفق و پیروز باشید
کیا کرباسی
انجمن های تخصصی
موضوعات انجمن ها:
1.میکروکنترلر microcontroller
AVR
PIC
خانواده8051
FPGA
2.میکروپروسور microporosor
میکروپروسور microporosor
3.روبات robat
مقالات مربوط به روبات
ساخت روبات
اخبار مسابقات
4.الکترونیک
مدارات
مقالات
دوست گرامی هر چه سریع تر به سایت بیا و قبل هر کاری فرم عضویت را پر کن
شما در انجمن می توانید مانند مدیر سایت مطلب نوشته ویا سوالاتتان را بپرسید
اگر هم به ساخت روبات و برنامه نویسی علاقه داری سریعا کلیک کن.
دوستان حتما نظرشون رو در مورد انجمن ها بنویسند.
ارتباط با ما !
سلام ...
بالاخره از شمال برگشتیم و دوباره کار بلاگیدن شروع کردیم
اول از همه از دوستانی کامنت هاشون به ما خیلی لطف کردن کمال تشکر رو دارم .
جون که دیدم یه عده از دوستان سوال فنی دارن و منم وقت نداشتم برای همه یکی یکی میل بزنم این پست رو گذاشتم. ای میل من :
دوستان می تونین به این آدرس میل یا IM بزنین ... (حتما پاسخ خواهم داد -البته از راه IM )
امیدوارم همیشه پیروز و سر بلند باشید ...
آموزش ساخت ربات مسیریاب (برنامه نویسی )
سلام دوستان!
همونطور که اطلاع دارید قرار بود زحمت برنامه نویسی رو سالار بکشه ولی امان از .....
اما من که نمی زارم میت رو زمین بمونه.
به امید خدا از امروز برنامه نویسی رو خودم شروع می کنم ....
امروز می خواهیم برنامه ای بنویسیم که بوسیله اون بشه استپر موتورهامون رو راه اندازی کنیم (عین همین روش رو باید در برنامه اصلی ربات استفاده کنیم) :
|
$crystal = 1000000 Config Portb = Output Dim A As Byte B = &B10001000 Do Rotate B , Right Waitms 15 End |
خوب حالا خط به خط تحلیل می کنیم. البته خوب یادمه توضیحات کاملی رو در مورد کدهای استفاده شده در چهار خط اول در پست های "آموزش ساخت ربات (میکرو کنترلر 1 - 2 - 3 - 4) دادم. پس اگه یادتون رفته بهشون دوباره سر بزنید.
|
Dim A As Byte Dim B As Byte |
کلا در زبان های خانواده بیسیک که کامپایلر BASCOM هم از اون استفاده می کنه، از کلمات Dim و as به صورت Dim varname as type برای تعریف متغیر استفاده می شه، که varname نام متغیر و type نوع متغیر هستش. در اینجا دو متغیر به نامهای A و B با نوع Byte معرفی شدن (هر بایت از ۸ بیت تشکیل شده)
|
B = &B10001000 |
استفاده از " مقدار = نام متغیر " که برای همه قابل درکه (یعنی یک مقدار رو داخل متغیر بریزیم) اما در اینجا بجای مقدار از &B10001000 استفاده شده. برای قرار دادن مقادیر به صورت باینری در یک متغیر (در این زبان) باید مقدار باینری رو بعد از B& بنویسم. در اینجا، هم در A و هم در B مقدار باینری ۱۰۰۰۱۰۰۰ معادل دهدهی ۱۳۶ رو قرار دادیم. که دلیلش رو توضیح خواهم داد.
باقیش بمونه برای جلسه بعد !
اینم یه لینک برای کسانی که می خوان سریع یه مسیریاب بسازن :
نظر یادتون نره !